Notes:
La plupart des images uilisées proviennent des caméras panoramiques ou de navigation qui sont toutes les quatres situées dans la 'tête' des robots, perchée en haut d'un mât les plaçant à 1.40 m du sol. Dans l'ensemble elles simulent d'assez prés la vision d'un être humain.
Des images proviennent quelques fois des caméras de detection des obstacles qui utilisent un trés grand angle et sont placées prés du sol à l'avant et à l'arrière des véhicules.
Images en couleur
Les images renvoyées par les deux robots sont toutes en noir et blanc. Toutefois, les deux caméras panoramiques sont équipées chacune d'un jeu différent de filtres de couleurs allant du violet à l'infrarouge, que l'équipe de contrôle choisi d'utiliser pour 'voir' le paysage dans différentes portions du spectre.
Lorsque celle-ci repère une 'cible' intéressante, elle ordonne au robot de prendre une séquence d'image correspondant à tous les filtres sur les deux caméras droite et gauche. Il est alors possible d'assembler une image en couleurs approximatives avec les vues de la caméra de gauche qui est équipée de filtres rouge (719/753nm), vert (535nm) et bleu (432nm), mais pas avec celles provenant de la caméra droite, qui n'a pas de filtre vert.
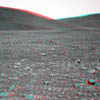
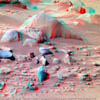
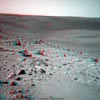
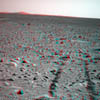
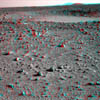
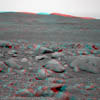
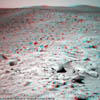
Il n'est donc pas possible non plus d'assembler un anaglyphe en couleurs destiné à être vue avec un filtre bleu/vert sur l'oeil droit - comme c'est généralement le cas. Mais il est possible de réaliser un anaglyphe 'inversé' qui nécessite de 'retourner' ses lunettes afin de placer le filtre rouge sur l'oeil droit.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}